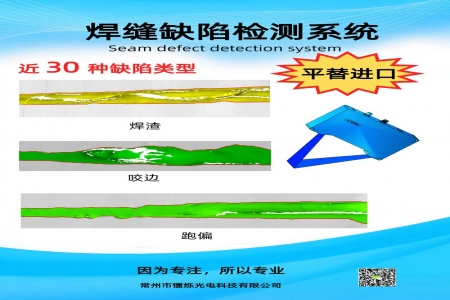
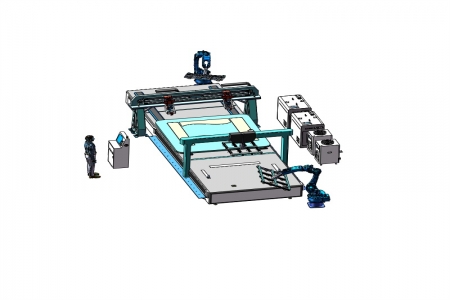
機器人焊縫跟蹤是自動化焊接中的關鍵技術,主要用于實時檢測焊縫位置并調整機器人路徑,確保焊接質量,常見的焊縫跟蹤方式有激光視覺跟蹤、電弧跟蹤、超聲波跟蹤、紅外跟蹤等等方式。

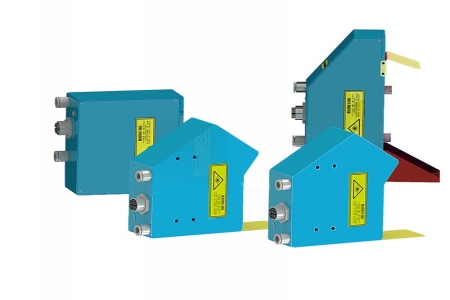
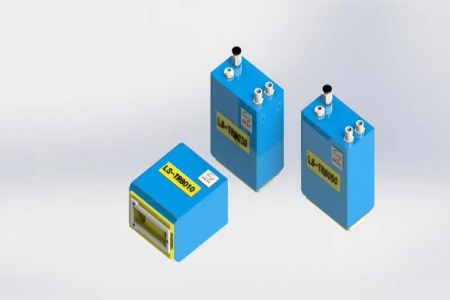
1. 激光視覺傳感
原理:通過激光線投射焊縫表面,攝像頭捕捉反射光,結合圖像處理獲取取焊縫特征。
優點:
高精度:鐳爍光電的焊縫跟蹤系統精度可達±0.01mm,適合復雜焊縫、細小焊縫跟蹤。
實時性強:動態跟蹤焊縫偏移。
缺點:
成本高:相對于其它跟蹤方式成本要稍高一些。
2. 電弧傳感
原理:通過監測焊接電流或電壓的變化,分析電弧長度波動來判斷焊縫位置。
優點:
無需額外傳感器:直接利用焊接電源信號,成本低。
適應性強:對坡口類型(如V型)敏感,適合角焊縫。
缺點:
精度有限:依賴坡口形狀,薄板或窄間隙效果差。
參數敏感:需嚴格匹配焊接參數(電流、速度)。
適用范圍窄:僅適用于特定焊縫類型。
3. 超聲波傳感
原理:通過超聲波探頭發射聲波,接收反射信號分析焊縫位置和缺陷。
優點:
穿透性強:適合厚板或多層焊檢測。
抗干擾強:不受煙塵、弧光影響。
可檢測內部缺陷:如氣孔、未熔合。
缺點:
響應速度慢:數據處理復雜,動態跟蹤能力弱。
精度受限:對表面粗糙度敏感。
探頭磨損:需定期維護。
4. 接觸式傳感(機械探頭)
原理:利用機械探頭接觸工件表面,通過位移反饋調整焊槍位置。
優點:
結構簡單:成本低,維護方便。
抗干擾強:不受光、煙塵影響。
可靠性高:適合穩定工況。
缺點:
機械磨損:探頭易損壞,需頻繁更換。
動態性差:僅適用于低速焊接。
適用性有限:無法檢測復雜焊縫。
5. 紅外傳感
原理:通過檢測焊接區域的紅外輻射溫度場變化,分析焊縫位置。
優點:
非接觸式:無機械磨損。
實時監測:可同步檢測焊縫溫度。
缺點:
精度低:易受材料表面狀態影響。
環境限制:高溫環境干擾大。
應用較少:多作為輔助傳感器。
6. 視覺傳感(非激光)
原理:使用普通攝像頭或工業相機,結合圖像算法識別焊縫特征。
優點:
成本適中:無需激光器。
靈活性高:可通過算法適應不同焊縫。
缺點:
依賴光照:需穩定光源,抗干擾差。
計算復雜:實時性低于激光視覺。
綜合對比與選型建議
| 方式 | 精度 | 成本 | 抗干擾 | 適用場景 |
|---|---|---|---|---|
| 激光視覺 | 高 | 高 | 中 | 高精度復雜焊縫(汽車、航空航天) |
| 電弧傳感 | 中 | 低 | 高 | 高速MAG/MIG焊(鋼結構) |
| 超聲波 | 中 | 中 | 高 | 厚板或多層焊(船舶、壓力容器) |
| 接觸式 | 低 | 低 | 極高 | 低速簡單焊縫(低預算場景) |
| 紅外/普通視覺 | 低-中 | 中 | 低-中 | 輔助監測或特定工況 |
趨勢:多傳感器融合(如激光+電弧)逐漸普及,結合AI算法提升魯棒性。根據具體需求(精度、成本、環境)選擇合適方案,更多詳細可以咨詢我們鐳爍光電進行了解。